摘要:本文设计并实现了一套基于STM32F103C8T6微控制器的直流电机串级PID伺服控制系统。该系统采用TB6612FNG驱动芯片控制带霍尔编码器的直流减速电机,通过位置-速度双闭环串级控制架构,实现了对电机位置和速度的高精度、快速响应控制。
项目简介
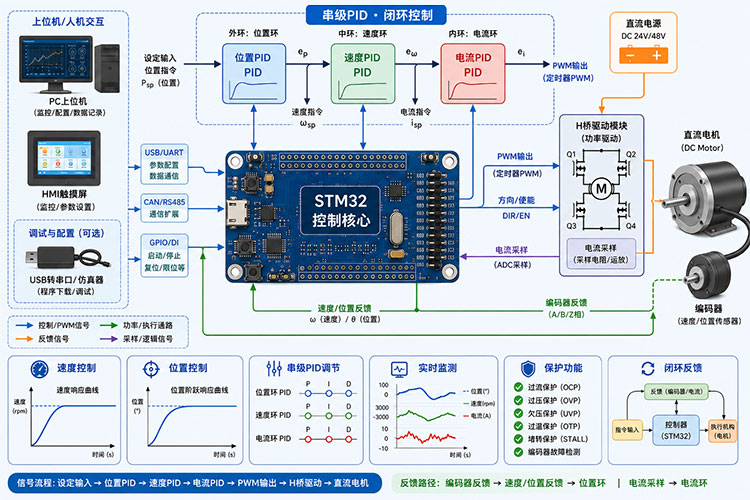
本项目基于STM32F103C8T6微控制器实现了一套高性能直流电机伺服控制系统,采用TB6612FNG驱动芯片和带霍尔编码器的直流减速电机,通过位置-速度双闭环串级PID控制架构,实现了对电机位置和速度的精确控制。系统软件采用分层模块化设计,控制核心在10ms定时器中断中执行,外环位置控制器(PD)输出目标速度,内环速度控制器(PI)快速跟踪并抑制扰动,配合VOFA+上位机实现实时数据可视化和参数整定,最终实现了快速响应、无超调的精确定位控制,为移动机器人和机械臂等应用提供了可靠的底层伺服驱动方案。
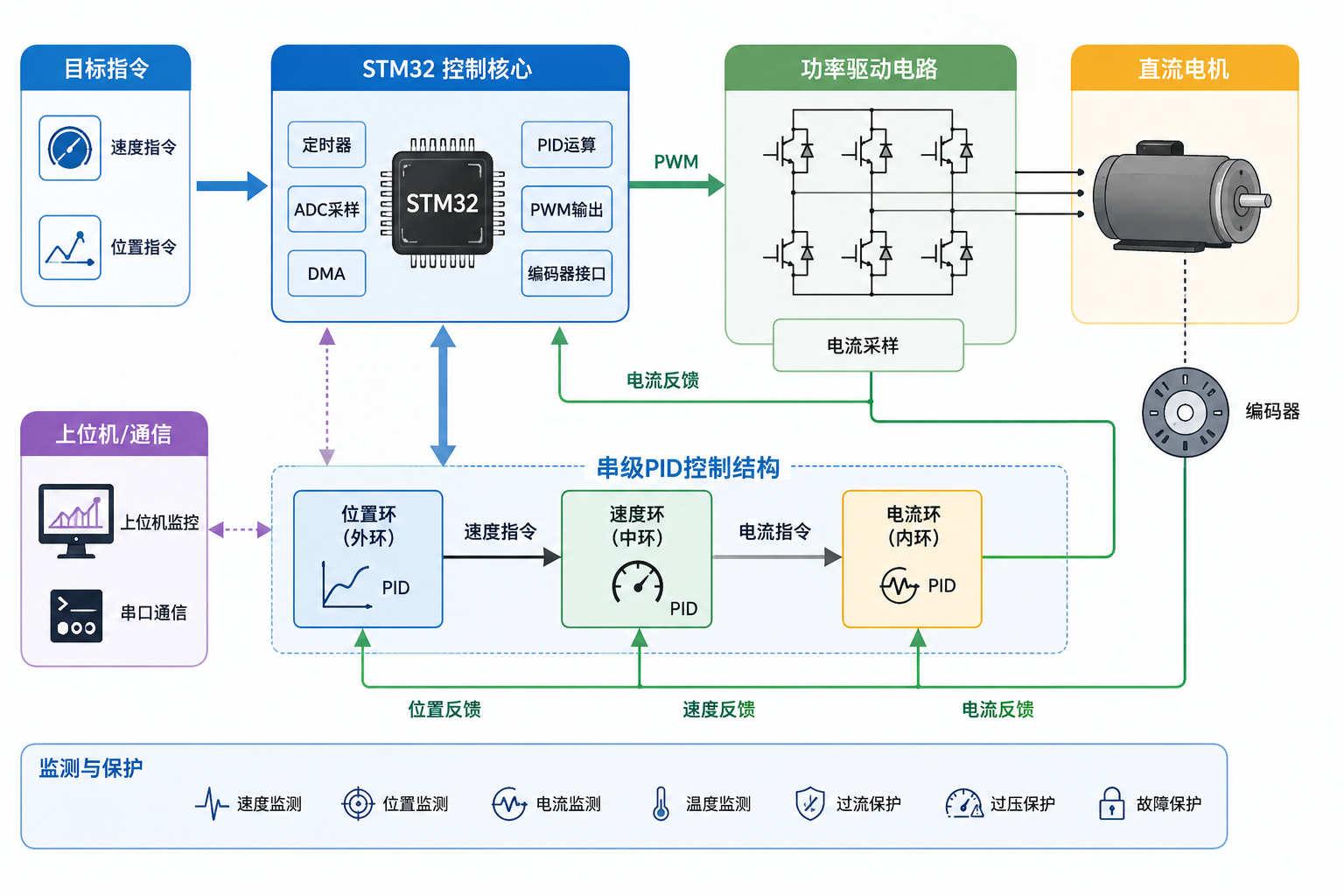
图1 系统架构图
项目代码:基于STM32的直流电机串级PID伺服控制系统设计与实现 需要另外购买。
开源协议
本项目采用AGPL-3.0开源协议,允许个人和组织自由使用、修改和分发代码,但基于本项目的衍生作品必须同样开源,且用于提供网络服务时需向用户提供完整源代码。本项目仅供学习研究使用,作者不对使用本项目产生的任何后果承担责任,使用者应遵守当地法律法规,合理合法使用本项目。如本项目对您的研究或工作有所帮助,欢迎引用并注明出处。
作者信息
作者:Steven
文档编号:Doc-5
原创声明:本文档为原创文档
版权声明:本站除特别标注外的所有源码与资料均为原创,受《中华人民共和国著作权法》等相关法律保护。未经本站事先书面许可,任何个人或机构不得以复制、转载、爬取、汇编、改写、引用等方式使用本站内容,不得将本站内容发布或用于任何形式的商业活动。对未经授权使用本站内容的行为,本站保留追究法律责任的权利,包括但不限于要求删除、赔偿、诉讼等。如认为本站内容侵犯其合法权益,请提供权属证明并联系我们,我们将在核实后依法及时处理。
评论(0)