摘要:随着智能控制技术的快速发展,智能小车作为移动机器人的典型应用,在教育、娱乐和工业领域得到了广泛关注。本文设计并实现了一种基于STM32F10x微控制器的蓝牙控制智能循迹避障小车系统。
文档简介
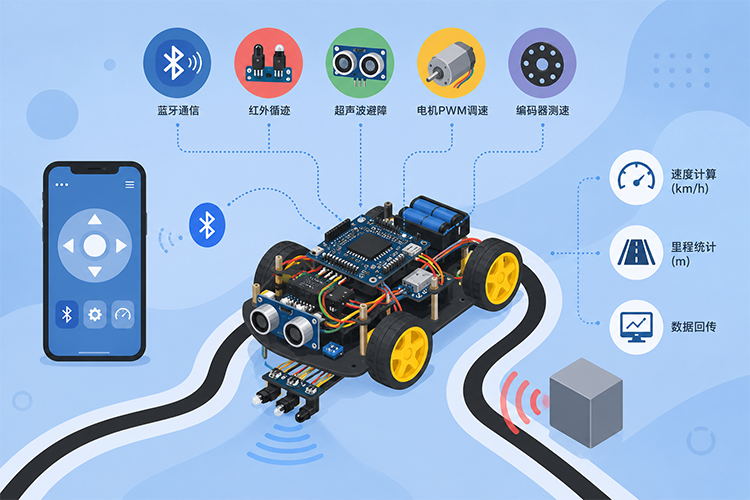
系统以STM32F103单片机为核心控制器,采用模块化设计思想,集成了蓝牙无线通信、红外循迹、超声波避障、电机PWM调速、编码器测速等多个功能模块。系统具有两种工作模式:自动循迹避障模式和蓝牙手动控制模式,可通过蓝牙指令实现模式切换和运动控制。
在硬件设计方面,采用L298N驱动芯片控制四路直流电机,使用HC-SR04超声波模块实现30-50cm范围的障碍物检测,通过红外对管实现黑线循迹功能,利用光电编码器进行速度和里程测量。在软件设计方面,基于STM32标准外设库开发,使用定时器中断实现PWM软件调速,通过外部中断捕获编码器脉冲,采用温度补偿算法提高超声波测距精度。系统能够实时计算小车速度(km/h)和累计行驶距离(m),并通过串口将数据回传至上位机或手机APP。
实验结果表明,该系统运行稳定可靠,循迹精度高,避障反应灵敏,蓝牙控制响应及时。小车在自动模式下能够准确沿黑线行驶并自主避开障碍物,在手动模式下可实现前进、后退、左转、右转、停止等多种运动控制,速度测量误差小于5%,测距精度达到±2cm。本设计为智能小车控制系统的研究与开发提供了一种实用的解决方案,具有良好的应用价值和推广前景。
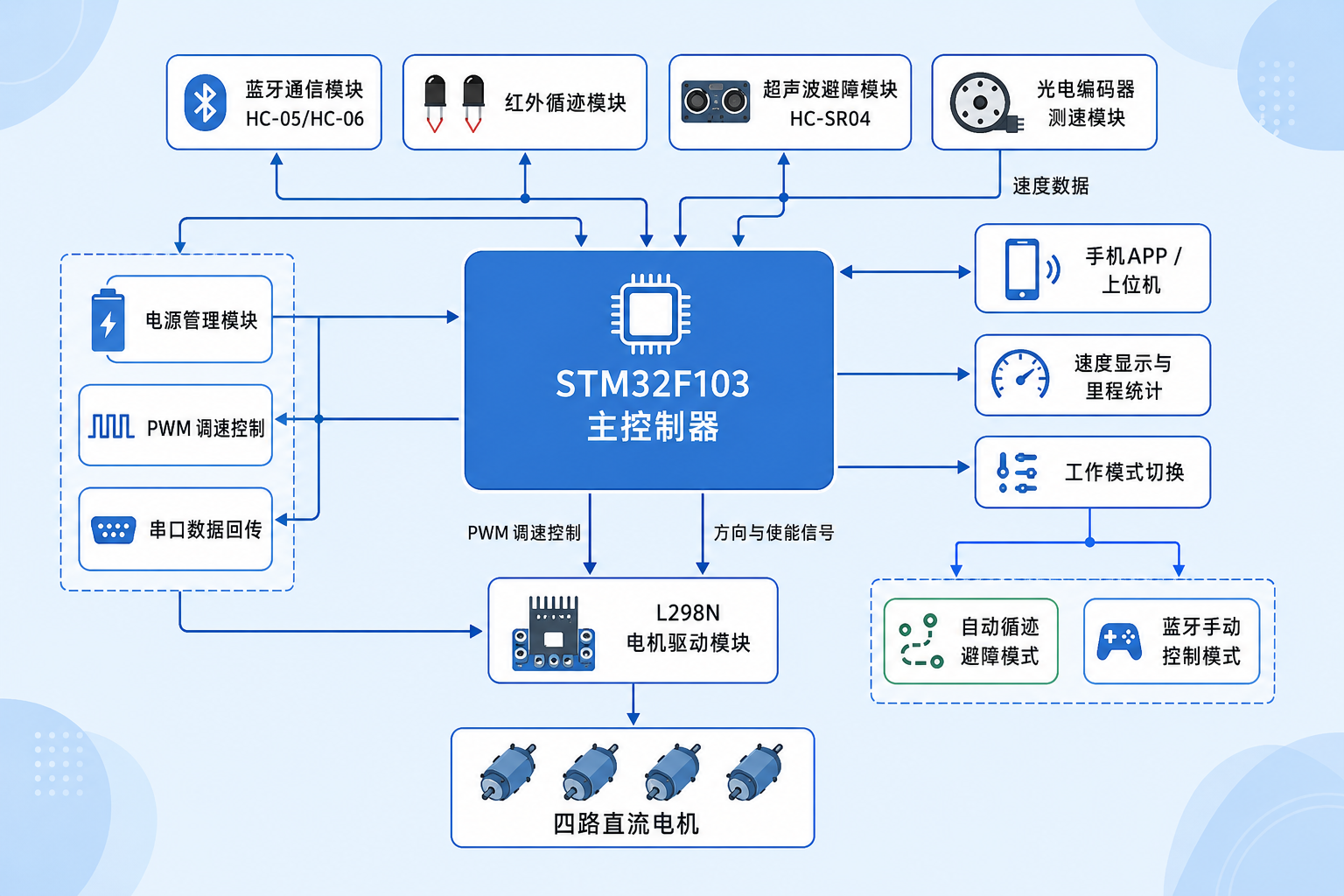
图1 智能温室控制系统架构图
文档参数
文档页数
– 共计:39页 字数:17822字
项目代码
项目代码:基于STM32的蓝牙控制智能循迹避障小车设计与实现 需要另外购买。
使用授权
本项目采用AGPL-3.0开源协议,允许个人和组织自由使用、修改和分发代码,但基于本项目的衍生作品必须同样开源,且用于提供网络服务时需向用户提供完整源代码。本项目仅供学习研究使用,作者不对使用本项目产生的任何后果承担责任,使用者应遵守当地法律法规,合理合法使用本项目。如本项目对您的研究或工作有所帮助,欢迎引用并注明出处。
作者联系
作者信息
改进作者:Steven(可提供二次开发有偿技术服务)
项目编号:Doc-11
改进声明:本项目为改进作品
联系方式

评论(0)