
摘要:随着智能家居技术的快速发展,家用清洁机器人已成为提高生活质量的重要工具。本文设计并实现了一种基于STC89C51单片机的智能扫地车控制系统,该系统集成了自动扫地、吸尘和智能避障等功能,能够在室内环境中自主完成清洁任务。
项目简介
系统以STC89C51单片机为核心控制器,采用L298N驱动芯片控制直流电机,通过PWM(脉冲宽度调制)技术实现电机的精确调速。 避障功能采用红外传感器实时检测前方障碍物,当检测到障碍物时,系统自动控制小车转向以避开障碍。为提高系统的实用性, 设计了定时控制功能,用户可通过按键设置6档工作时间(15、30、45、60、75、90分钟),时间到达后系统自动停止工作。
测试结果表明,该智能扫地车能够稳定运行,避障灵敏可靠,定时功能准确,电机调速平稳,各项功能指标均达到设计要求。本设计具有成本低、结构简单、功能实用等优点,对智能家居清洁设备的研究与开发具有一定的参考价值。
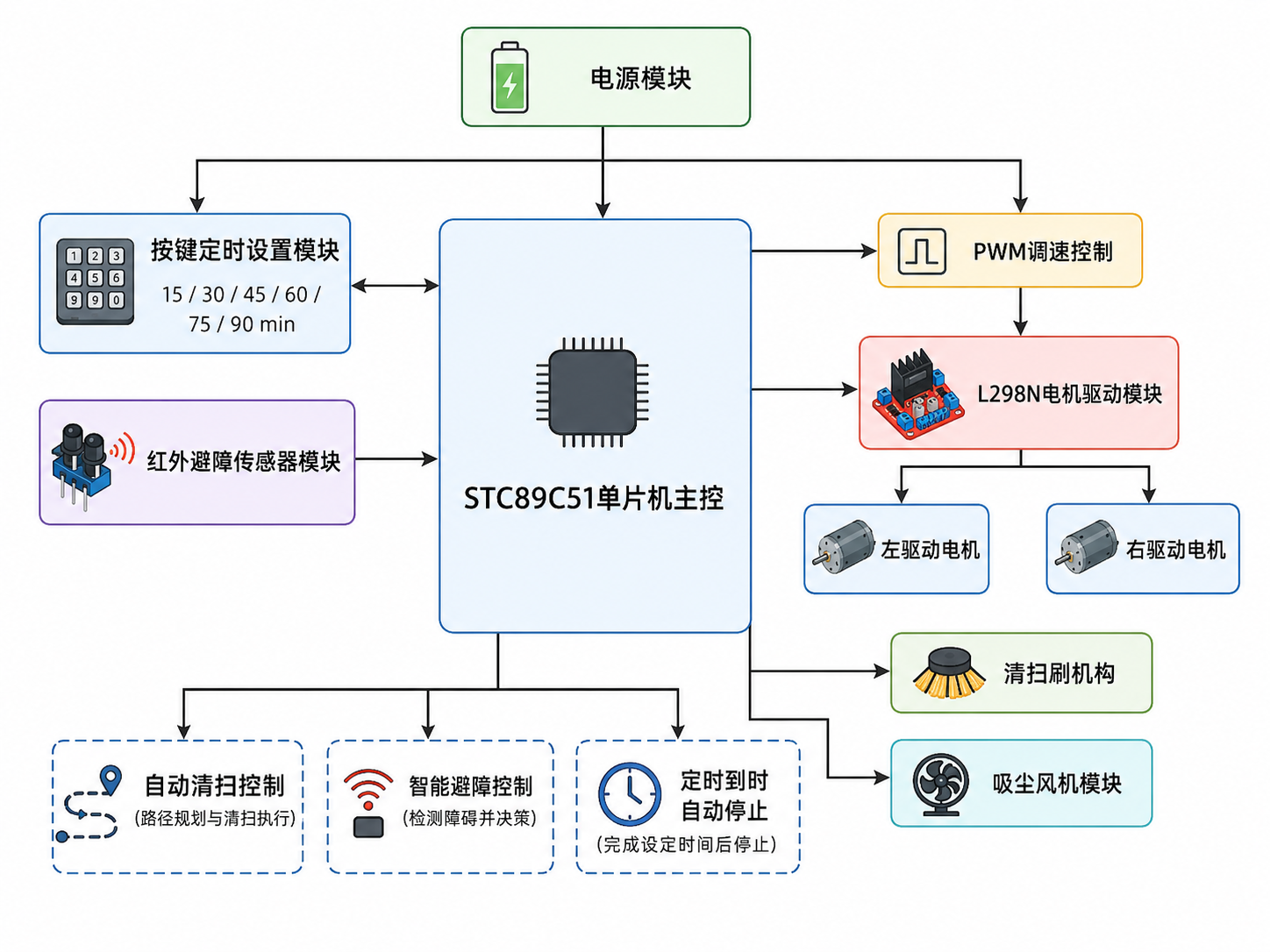
图1 基于51单片机的智能扫地车系统架构图
主要功能
本项目是一个基于STC89C51单片机的智能扫地车控制系统,集成了自动扫地、吸尘、智能避障、PWM调速、定时控制、按键控制和状态指示等七大核心功能,采用红外传感器实现自动避障,通过PWM技术实现电机0-20级精确调速,支持6档定时设置(15/30/45/60/75/90分钟),配备LED状态指示灯和按键控制,能够在室内环境中自主完成清洁任务,具有成本低、结构简单、功能实用等优点,非常适合作为毕业设计、课程设计或学习项目使用。
硬件设计
主要器件清单

表1 主要器件清单表
电源模块
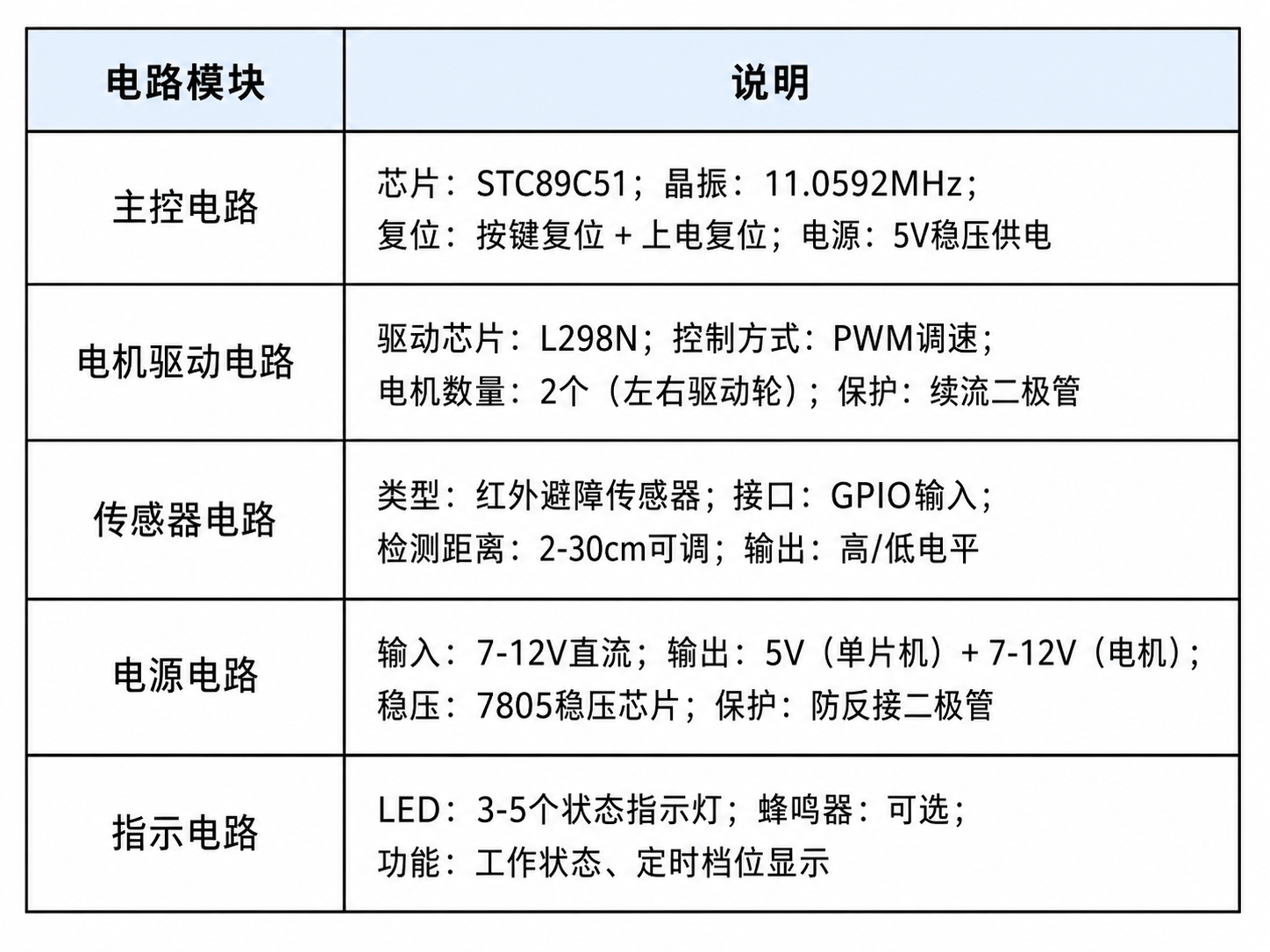
表2 电源模块表
软件架构
软件采用模块化设计,基于定时器中断实现PWM调速和定时控制,通过按键扫描、避障检测、电机驱动等功能模块协同工作,主循环负责状态监控和逻辑调度,中断服务程序负责精确的时序控制和PWM波形生成。
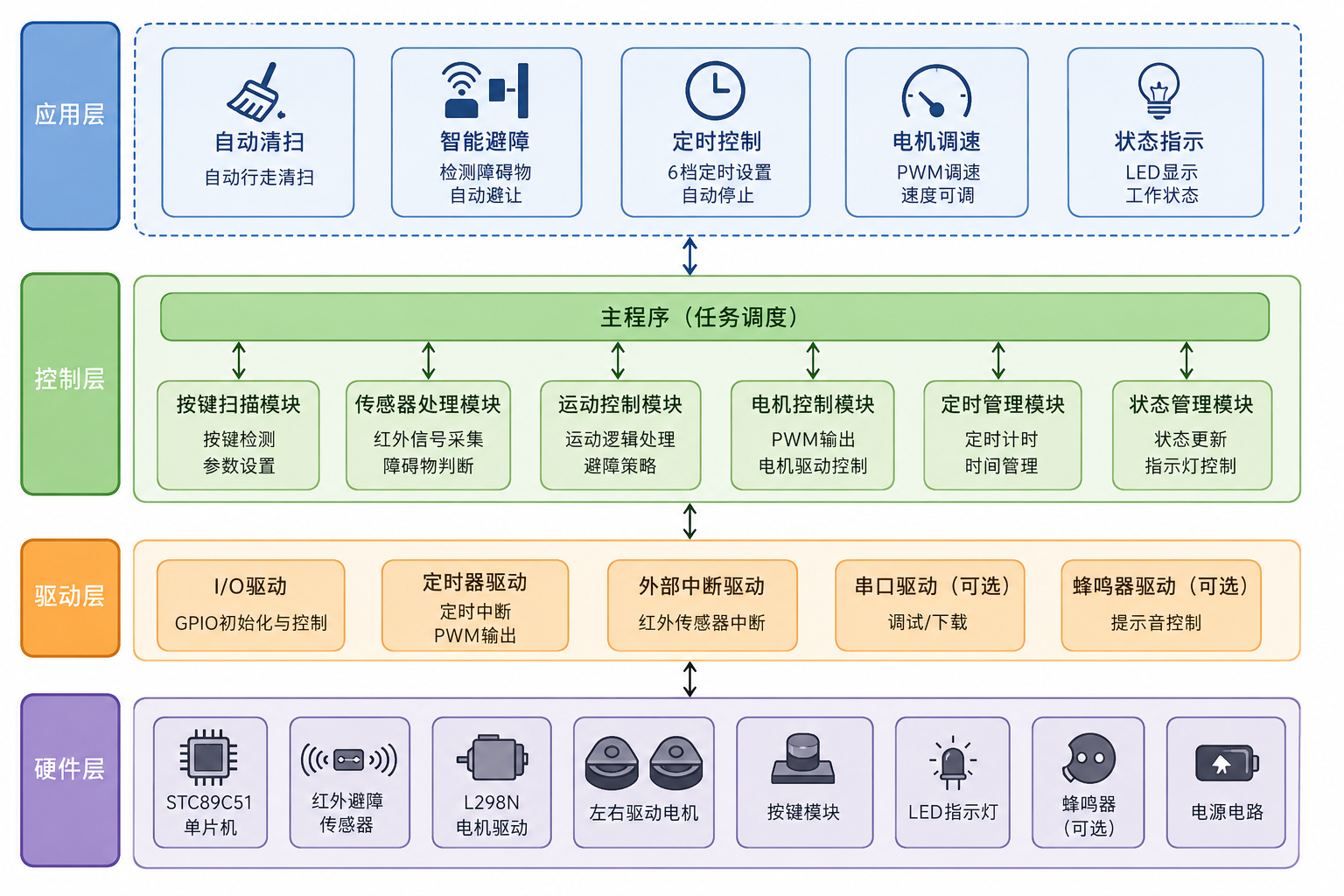
图2 软件架构图
软件环境
– IDE: Keil uVision 4/5
– 语言: C语言
– 编译器: C51
– 仿真: Proteus 7.8/8.x
快速开始
Step 1: 仿真测试
1. 打开仿真文件
文件: 10-仿真/car.pdsprj
软件: Proteus 7.8或更高版本
2. 加载程序
– 仿真文件已包含HEX文件
– 如需重新加载,右键单片机 → Edit Component → Program File
3. 运行仿真
– 点击播放按钮开始仿真
– 观察电机运转
– 测试按键功能
– 验证避障逻辑
Step 2: 代码编译
1. 打开Keil工程
文件: 1-程序/avoid3.uvproj
软件: Keil uVision 4/5
2. 编译项目
– Project → Build Target (F7)
– 检查编译输出
– 确认生成HEX文件
3. 修改代码(可选)
– 调整PWM占空比
– 修改定时时间
– 优化避障逻辑
Step 3: 程序烧录
1. 准备烧录器
– STC-ISP(STC芯片)
– 或其他51烧录器
2. 连接硬件
– 烧录器连接单片机
– 注意VCC、GND、RXD、TXD
3. 烧录程序
文件: 1-程序/avoid3.hex
软件: STC-ISP
波特率: 9600或更高
4. 上电测试
– 检查LED指示
– 测试按键功能
– 观察电机运转
技术参数
系统参数
系统采用STC89C51单片机作为主控芯片,工作电压5V(单片机)/7-12V(电机),整机电流小于1A,通过约1kHz的PWM频率控制3-6V直流电机,支持15-90分钟定时范围,红外避障距离2-30cm可调,响应时间小于100ms,PCB尺寸约10cm×8cm,具有低功耗、高集成度、响应快速等特点。
性能指标
系统性能指标优异,避障响应时间小于100ms,定时精度达到±1%,电机调速范围0-100%连续可调,工作时间15-90分钟可设,整机功耗小于10W,工作温度范围0-50℃,满足室内清洁机器人的实际应用需求。
硬件设计与仿真
原理图
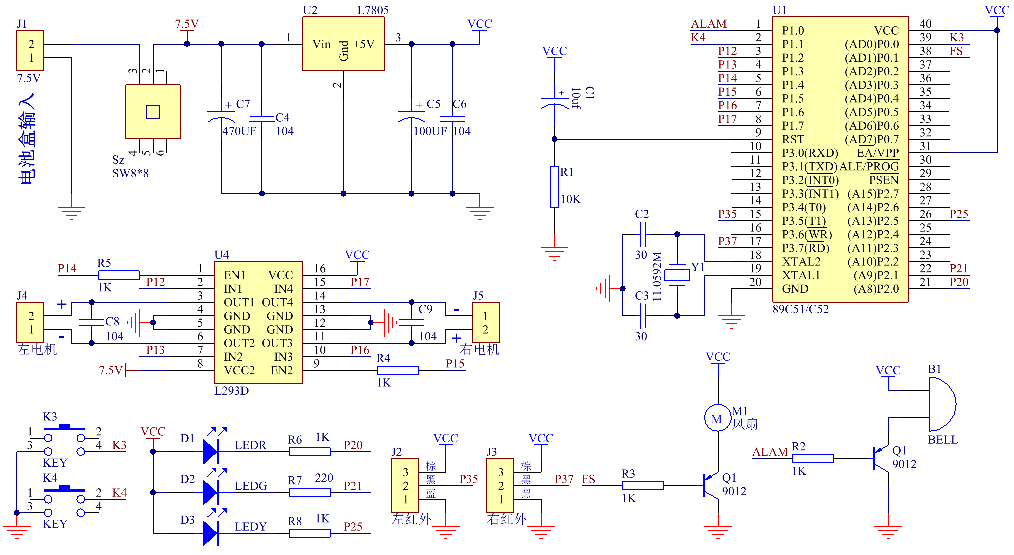
图3 原理图
PCB图
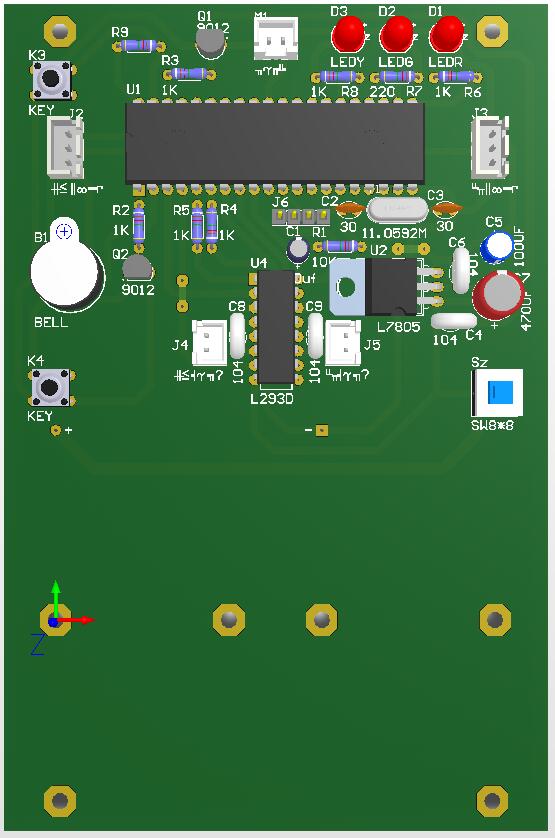
图4 3D PCB图
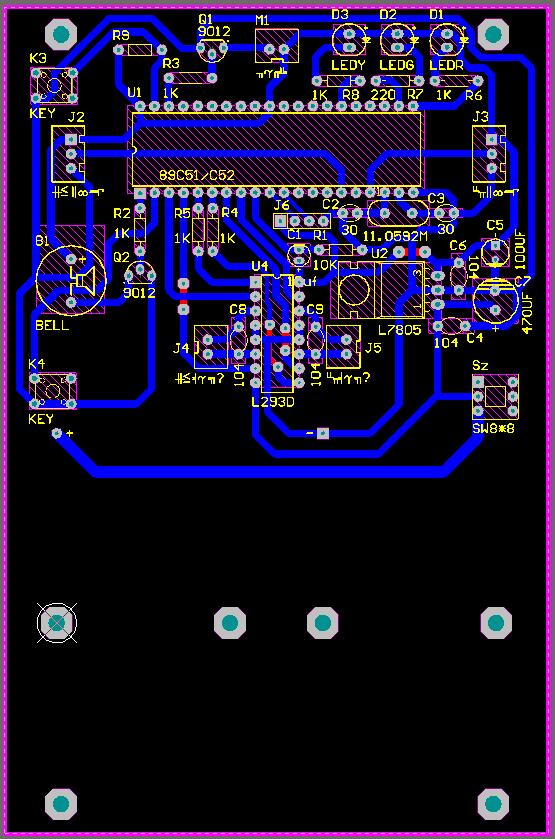
图5 PCB图
仿真图
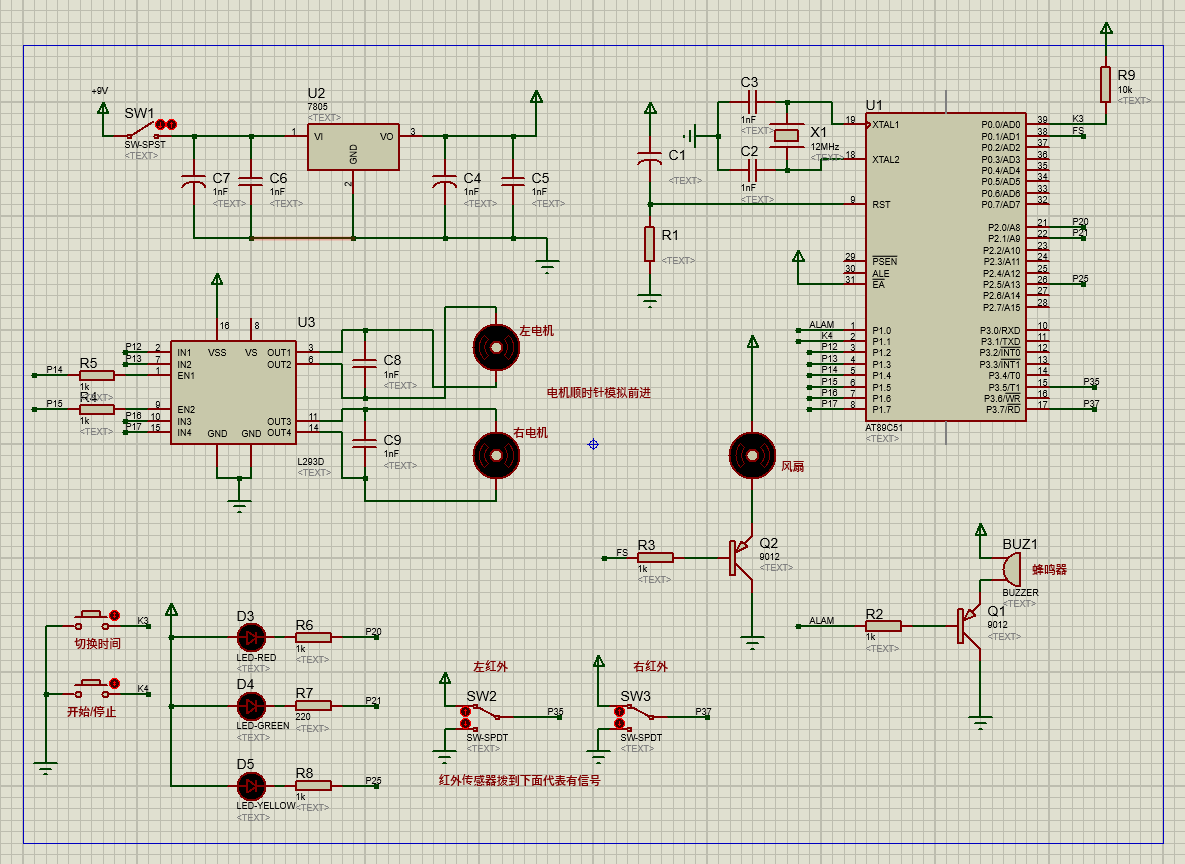
图6 仿真图
配套资源
包括完整的项目源代码、演示视频、运行截图,开箱即用。

项目文档
有偿提供开题材料、系统设计说明书和成果汇报PPT,完整呈现项目的研究依据、设计过程与最终成果。

使用授权
本项目采用AGPL-3.0开源协议,允许个人和组织自由使用、修改和分发代码,但基于本项目的衍生作品必须同样开源,且用于提供网络服务时需向用户提供完整源代码。本项目仅供学习研究使用,作者不对使用本项目产生的任何后果承担责任,使用者应遵守当地法律法规,合理合法使用本项目。如本项目对您的研究或工作有所帮助,欢迎引用并注明出处。
作者联系
作者信息
改进作者:Steven(可提供二次开发有偿技术服务)
项目编号:MCU-10
改进声明:本项目为改进作品
联系方式

评论(0)