摘要:本设计并实现了一个基于STM32F429ZET6微控制器的工业级单电机CANopen控制系统。系统采用双CAN总线架构,CAN1实现与电机驱动 器的CANopen CiA402协议通信,CAN2实现与上位机的自定义协议通信。针对原始系统存在的中断安全、实时性、可靠性等问题,本设计提出了一套完整的优化方案。
项目简介
本项目是一个基于STM32F429ZET6的工业级单电机CANopen控制系统,采用双CAN总线架构实现精密位置控制(精度0.01mm)。通过实施非阻塞状态机优化、临界区保护、CAN发送重试机制和通信故障自动恢复等技术方案,成功消除了200ms阻塞延迟,将CAN发送成功率提升至99%以上,系统代码质量达到工业级标准,可直接应用于工业自动化、精密测量和医疗设备等领域。
核心技术
本系统采用STM32F429ZET6高性能微控制器(主频180MHz)作为核心处理器,实现了高精度电机运动控制。系统位置控制精度达到0.01mm,速度控制范围覆盖1-1000mm/min,满足多种工业应用场景需求。在实时性方面,系统命令响应时间小于10ms,通信延迟小于5ms,确保了快速的动态响应能力。双CAN总线采用差异化波特率配置,CAN1以500kbps与电机驱动器进行CANopen协议通信,CAN2以450kbps与上位机进行数据交互,有效避免了总线冲突,保证了通信的稳定性和可靠性。这些技术指标使得系统能够胜任精密装配、自动化测量、医疗器械等对精度和实时性要求较高的工业应用场合。
硬件配置
硬件清单
本系统采用STM32F429ZET6作为核心控制器,主频180MHz,内置512KB Flash和256KB RAM,满足复杂控制算法需求。配备25MHz外部晶振,通过PLL倍频产生稳定系统时钟,确保CAN通信和定时器的时序精度。芯片集成双CAN控 制器、UART、SPI等丰富外设接口,为系统扩展提供灵活性。
电机系统采用ECU1603CH24-C040无刷直流电机,配备82.7:1行星齿轮减速器,提升输出扭矩并增强低速控制精度。集成1024线磁性增量编码 器,4倍频后达到4096 CPR分辨率,结合5mm螺距丝杠实现0.00125mm理论精度。驱动器支持CANopen CiA402协议,提供位置、速度、回零等多种工作模式。
系统采用双CAN总线架构,每路配备SN65HVD230高速CAN收发器,支持最高1Mbps通信速率,具有低功耗和高抗干扰能力。CAN1连接电机驱动器(500kbps),CAN2连接上位机(450kbps),双总线物理隔离设计避免信号干扰,提升系统实时性和可靠性。
引脚连接:CAN1(电机驱动器)
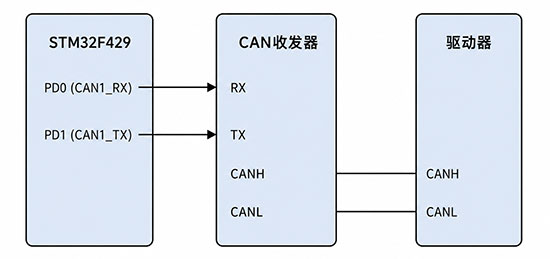
图1 CAN1-电机驱动器引脚连接示意图
引脚连接:CAN2 (上位机)
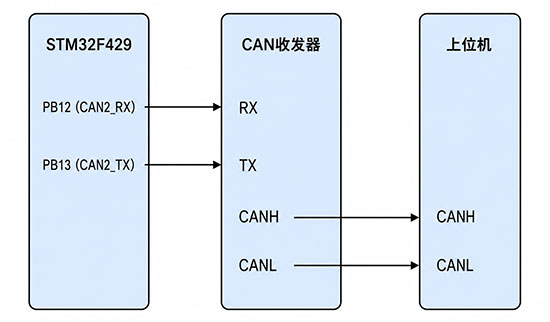
图2 CAN2-上位机引脚连接图
终端电阻
⚠️ 重要: CAN总线两端必须接120Ω终端电阻
软件架构
系统架构图
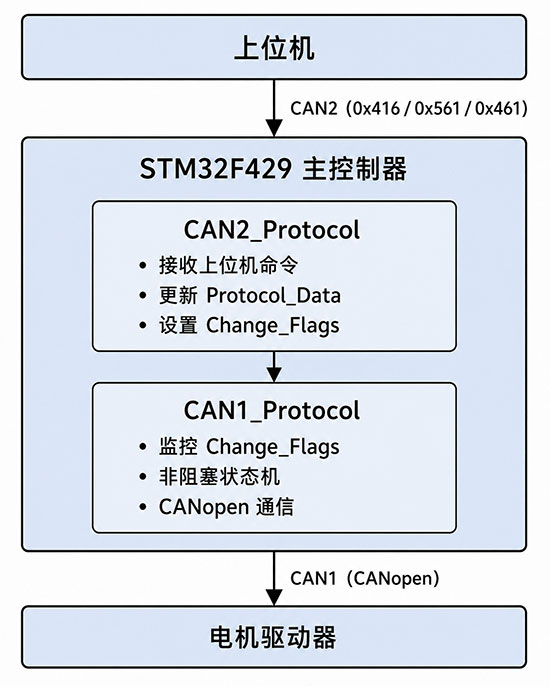
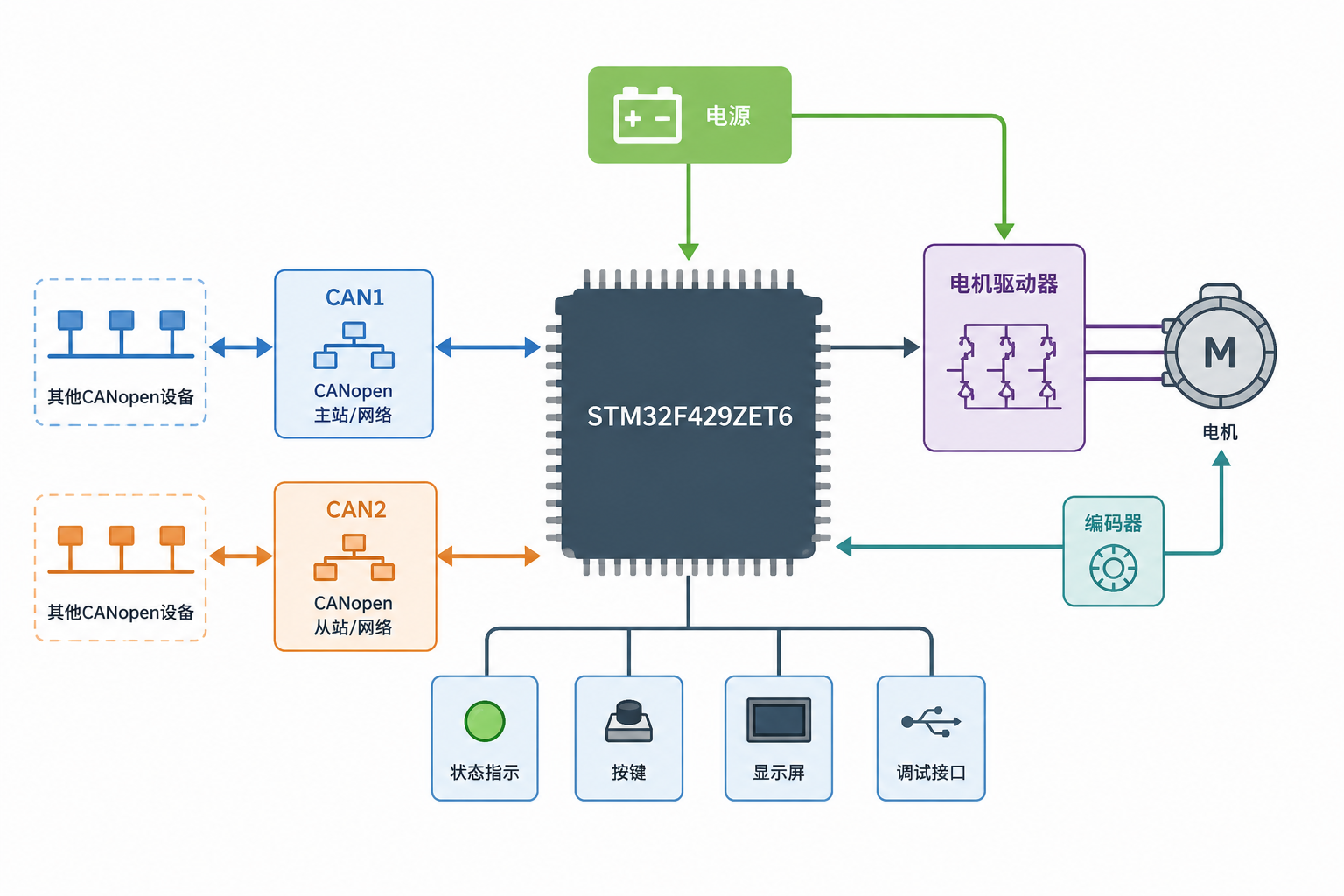
图3 软件架构图
数据流程图
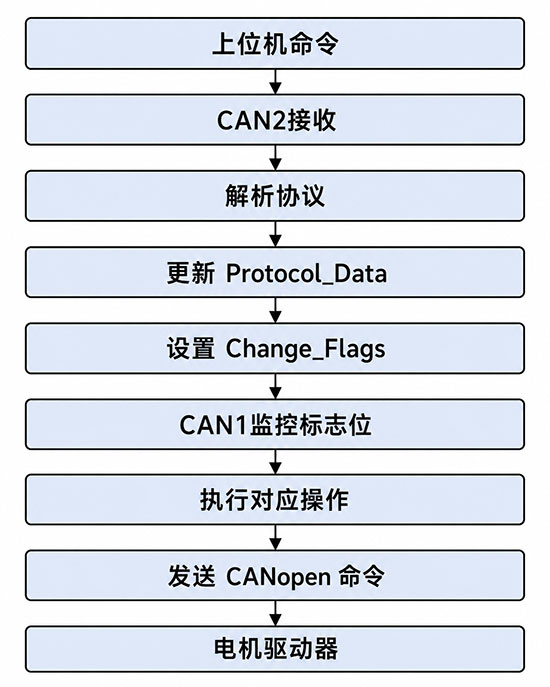
图4 数据流程
快速开始
本系统基于Keil MDK-ARM V5.x开发环境进行编译和下载。
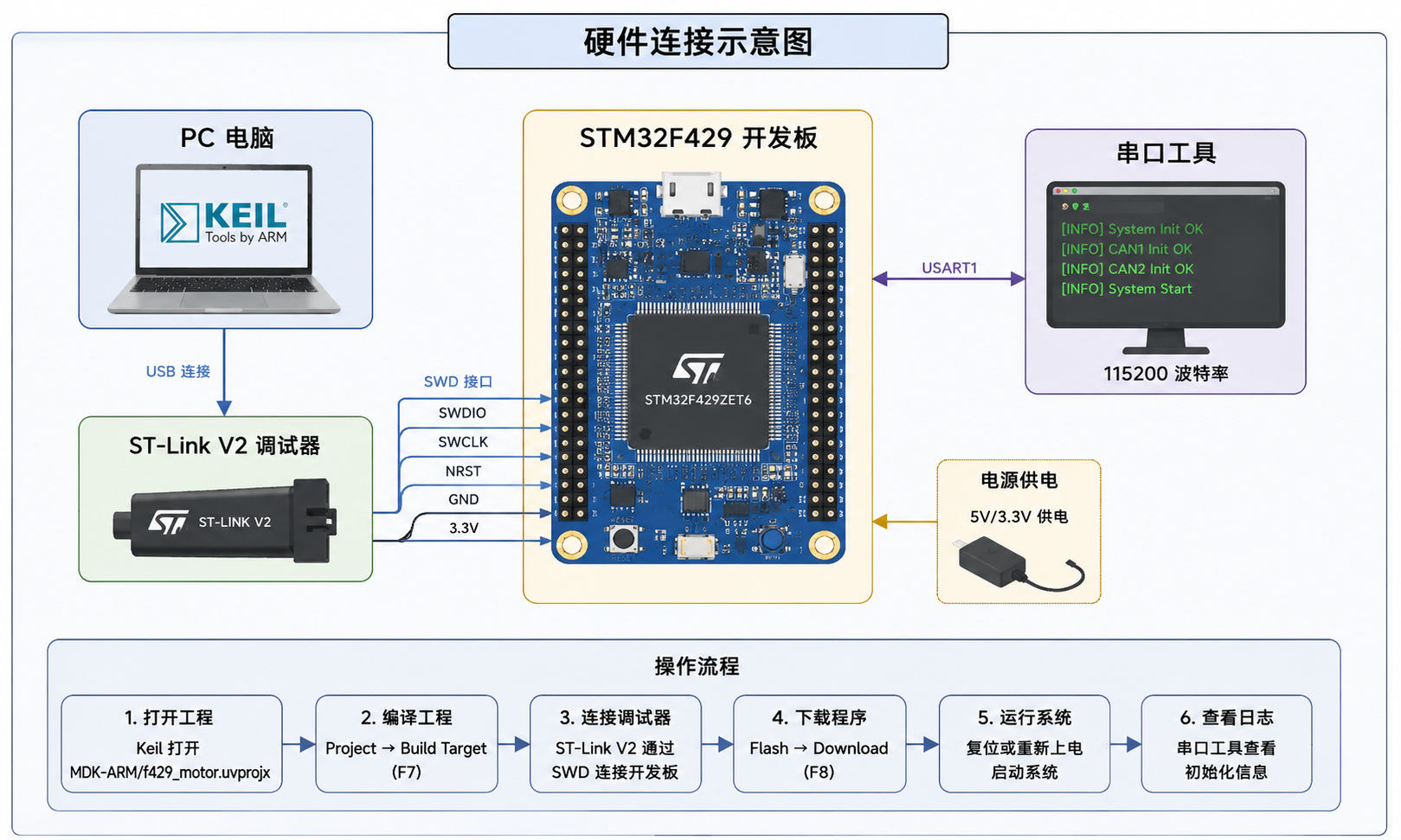
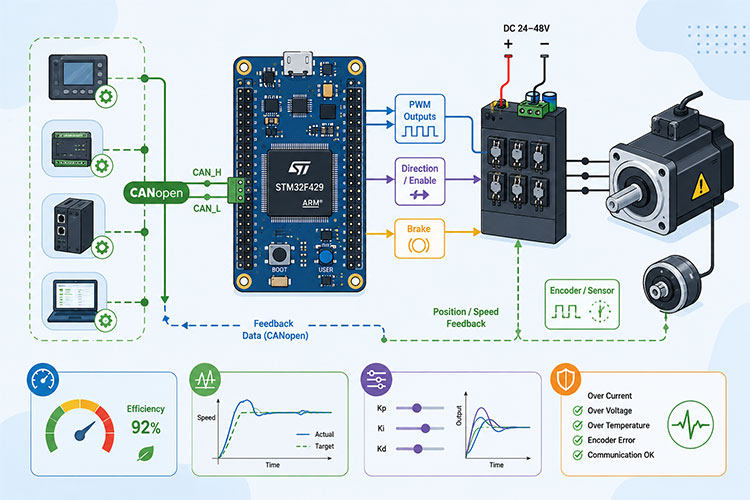
图5 硬件连接示意图
使用Keil打开项目工程文件MDK-ARM/f429_motor.uvprojx,该工程已配置好编译 选项和外设库路径。点击Project → Build Target(快捷键F7)启动编译,确保编译无错误提示。编译成功后,使用ST-Link V2调试器通过SWD接口连接开发板,点击Flash → Download(快捷键F8)将程序下载到Flash存储器。下载完成后复位或重新上电启动系统, 建议通过串口工具(115200波特率)查看初始化信息,确认系统正常启动。
配套资源
包括完整的项目源代码、演示视频、运行截图,开箱即用。

项目文档
有偿提供开题材料、系统设计说明书和成果汇报PPT,完整呈现项目的研究依据、设计过程与最终成果。

使用授权
本项目采用AGPL-3.0开源协议,允许个人和组织自由使用、修改和分发代码,但基于本项目的衍生作品必须同样开源,且用于提供网络服务时需向用户提供完整源代码。本项目仅供学习研究使用,作者不对使用本项目产生的任何后果承担责任,使用者应遵守当地法律法规,合理合法使用本项目。如本项目对您的研究或工作有所帮助,欢迎引用并注明出处。
作者联系
作者信息
改进作者:Steven(可提供二次开发有偿技术服务)
项目编号:STM32-3
改进声明:本项目为改进作品
联系方式

评论(0)